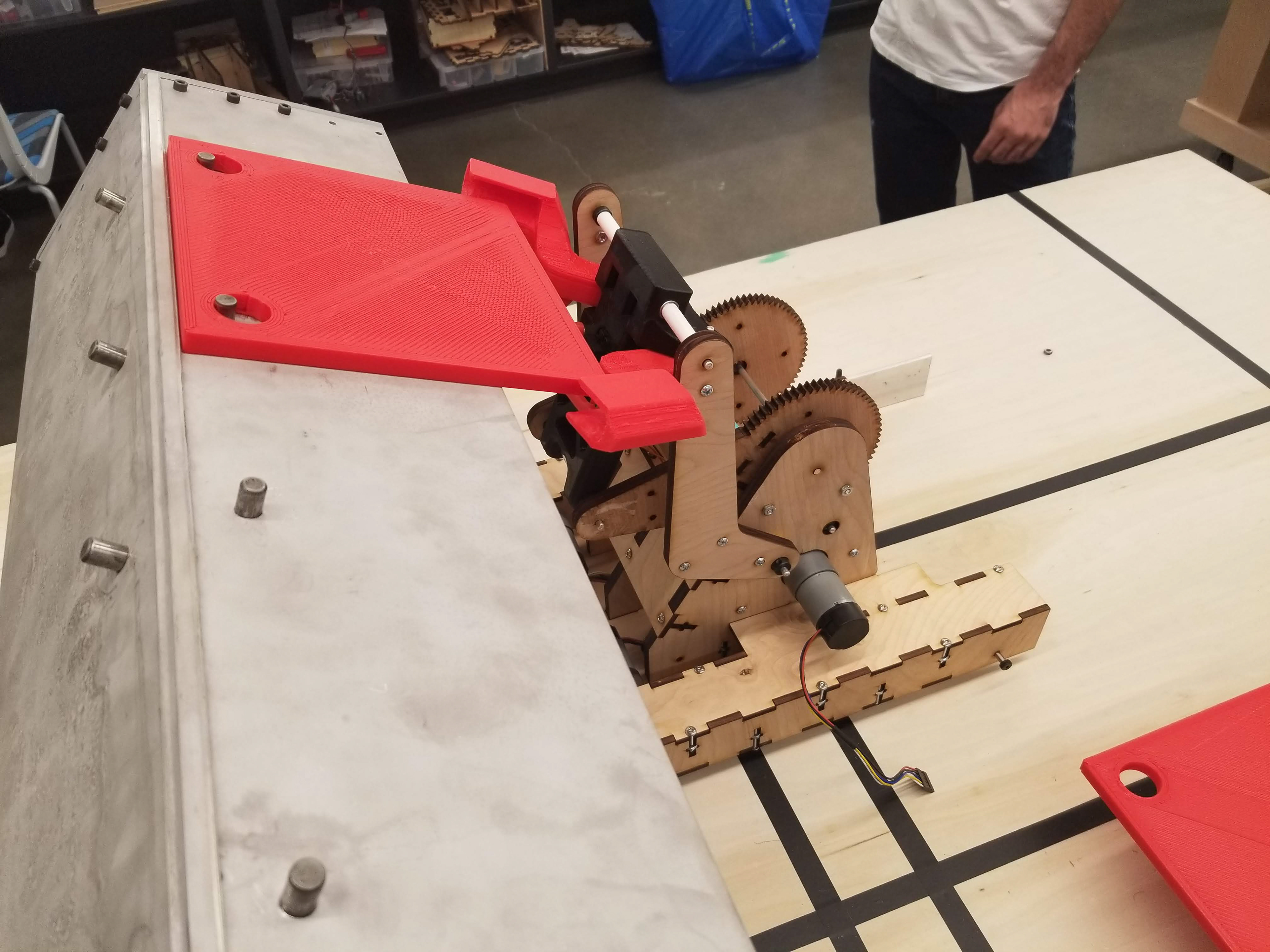
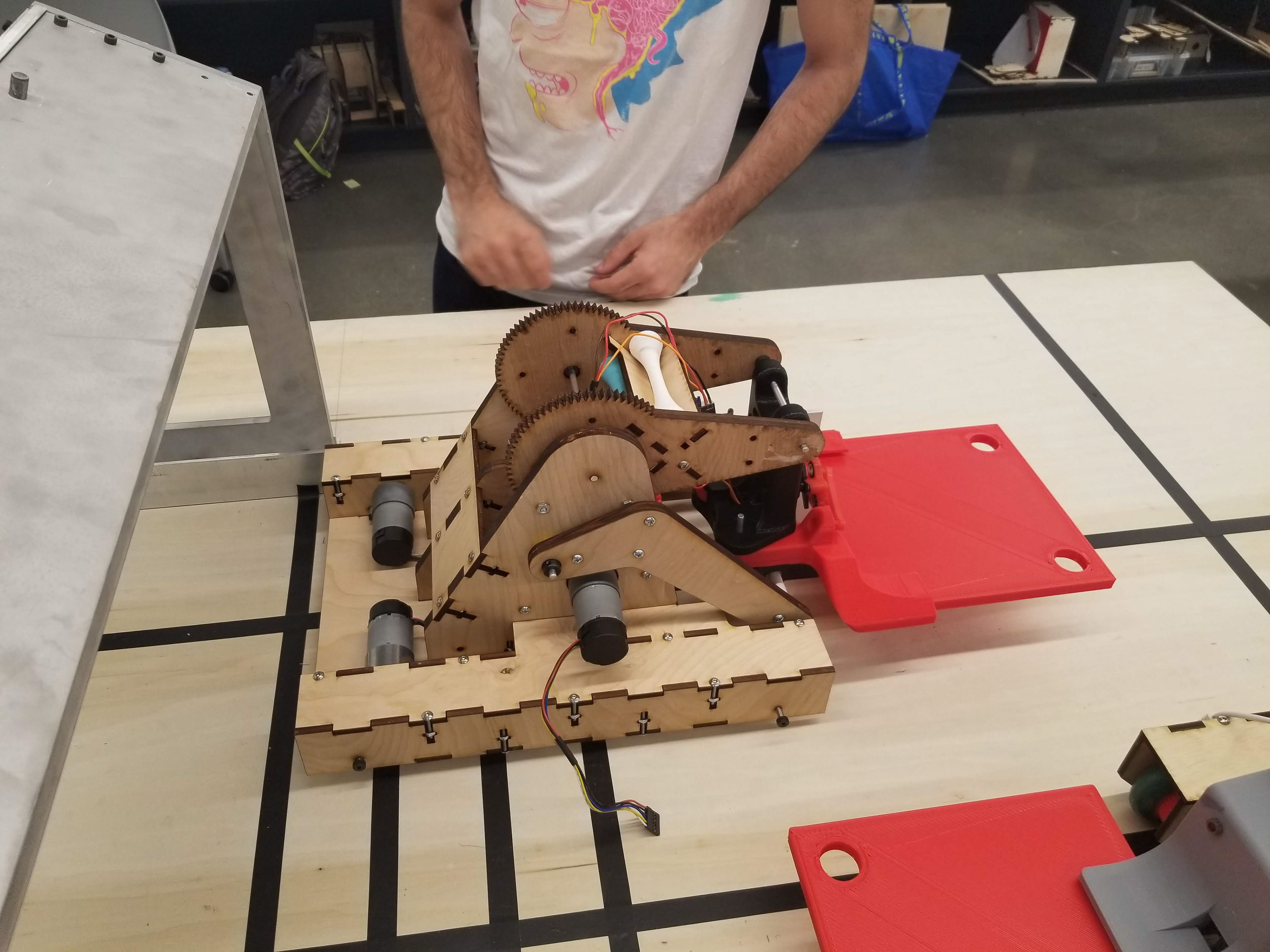
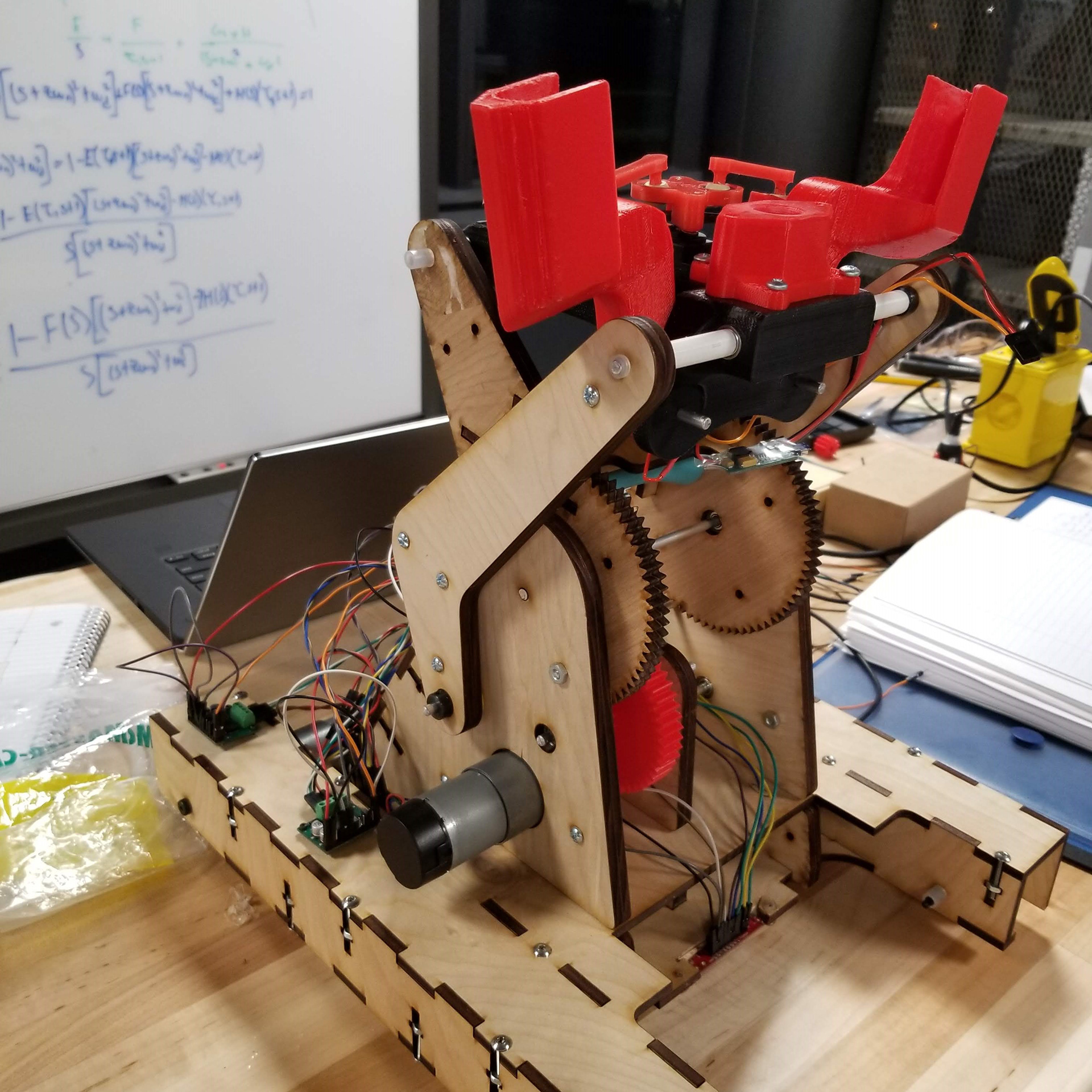
RBE 2001 - Actuation
Design Goal: To create a robot with a four-bar linkage that translates through three poses
Main Learnings: DFA and DFM, Linkage Design, Drivetrain Design
Design Goal: To create a robot with a four-bar linkage that translates through three poses
Main Learnings: DFA and DFM, Linkage Design, Drivetrain Design
RBE 2002 - Sensing
Design Goal: To design a fire-fighting robot that could find then extinguish a flame in an unknown city
Main Learnings: Holomonic Controls, A* Pathfinding, Thermal Sensing, Design For Robustness
Design Goal: To design a fire-fighting robot that could find then extinguish a flame in an unknown city
Main Learnings: Holomonic Controls, A* Pathfinding, Thermal Sensing, Design For Robustness
RBE 3001 - Manipulation
Design Goal: Program a robot to sort pucks by size and color
Main Learnings: PIDG Control Theory, Inverse Kinematics, Motion Planning, and Vision
Design Goal: Program a robot to sort pucks by size and color
Main Learnings: PIDG Control Theory, Inverse Kinematics, Motion Planning, and Vision
RBE 3002 - Navigation
Design Goal: Use SLAM to map a novel maze, then solve it as fast as possible
Main Learnings: ROS, SLAM, Kalman Filtering, Feedforward Motion Planning
Design Goal: Use SLAM to map a novel maze, then solve it as fast as possible
Main Learnings: ROS, SLAM, Kalman Filtering, Feedforward Motion Planning
RBE 4815 - Industrial Robotics
Design Goal: Program an ABB industrial arm to play Scrabble
Main Learnings: Industrial Programming, Frame References, D-H Parameters, Kinematic Analysis
Design Goal: Program an ABB industrial arm to play Scrabble
Main Learnings: Industrial Programming, Frame References, D-H Parameters, Kinematic Analysis